HydroVision: LiDAR-Guided Hydrometric Prediction with Vision Transformers and Hybrid Graph Learning
The paper "HydroVision: LiDAR-Guided Hydrometric Prediction with Vision Transformers and Hybrid Graph Learning" by Naghmeh Shafiee Roudbari, Ursula Eicker, Charalambos Poullis, Zachary Patterson has been accepted for publication in 19th International Symposium on Visual Computing (ISVC), 2024.
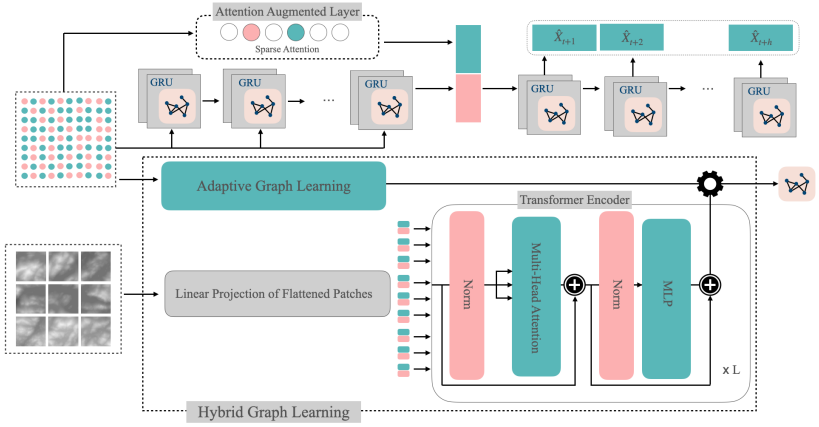
TL:DR: A hybrid graph learning model using LiDAR terrain elevation data encoded with a Vision Transformer (ViT) and GRU blocks with graph convolution improves hydrometric forecasting. By combining static and dynamic graph learning, the method enhances spatial-temporal water flow predictions, achieving a 10% reduction in error, particularly for longer forecasts.